Method
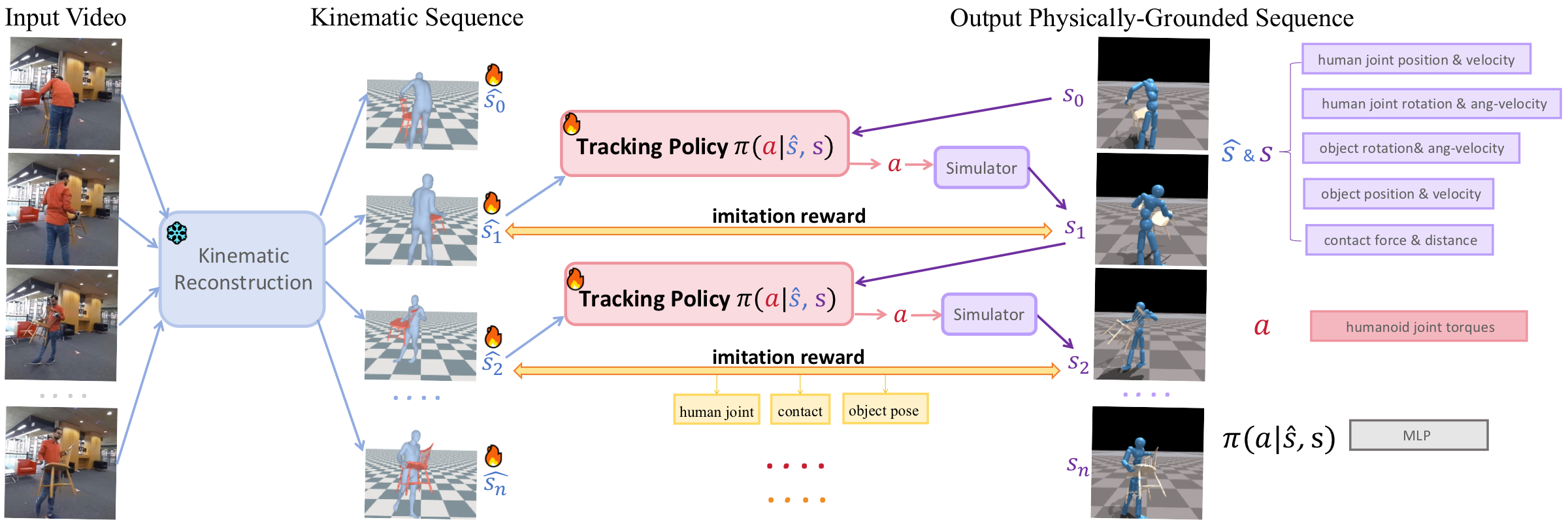
Overview of our two-stage pipeline. In the first stage, we use an off-the-shelf kinematic reconstruction method, VisTracker, to recover human-object interactions in global coordinates from the input video. These kinematic estimates are often noisy and may contain incorrect contact, penetration, or floating artifacts. In the second stage, we train a physics-based tracking policy to imitate the reference kinematics inside a simulator with reinforcement learning. The policy takes the current physical state and future reference states as input, and produces actions that preserve both motion fidelity and physical plausibility. Adaptive sampling, dual propagation, and kinematics updates make the training stable even when the input sequence is severely corrupted.
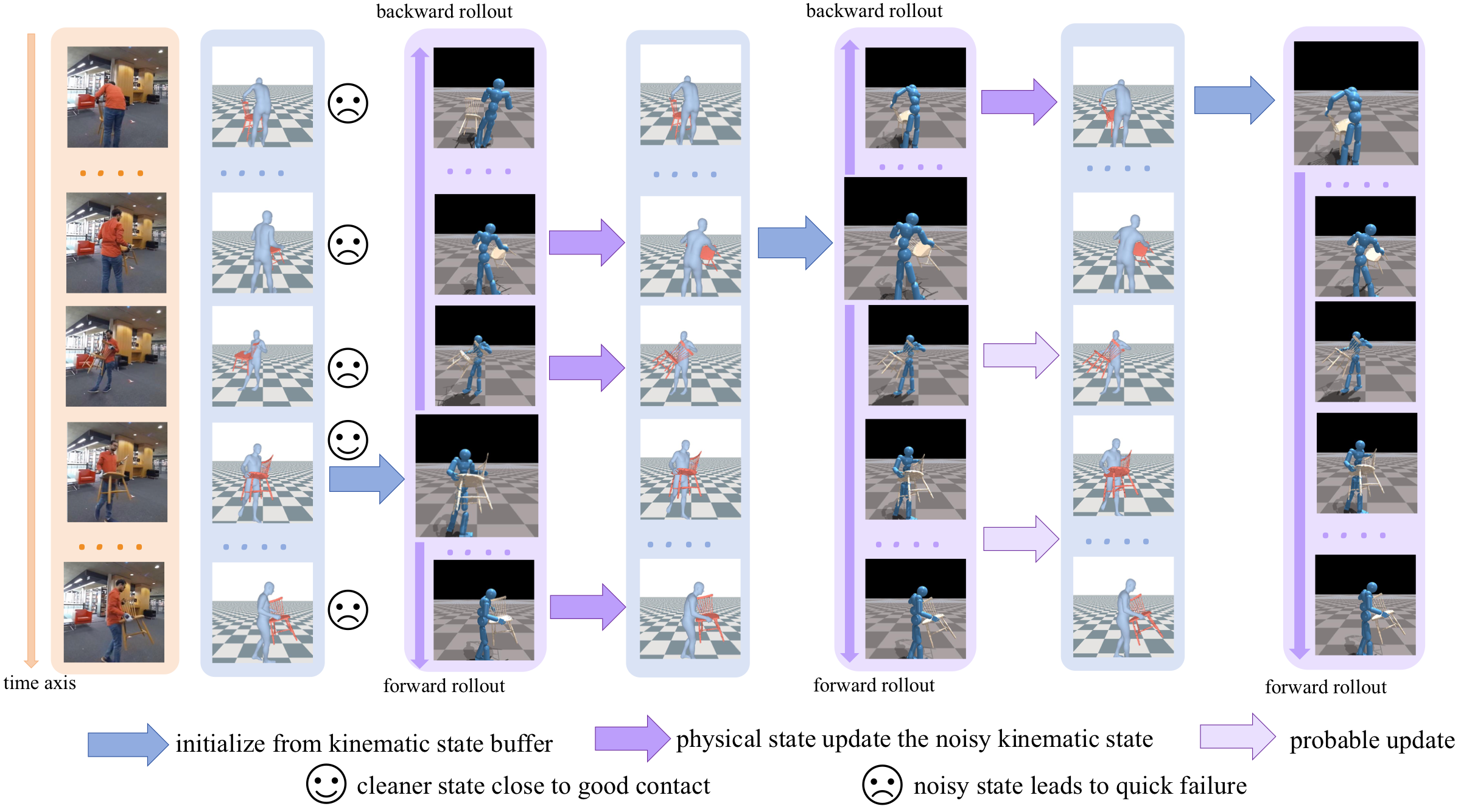
Overview of our dual propagation with kinematics update mechanism. Kinematic estimates from monocular videos are often highly noisy. Rollouts initialized from these noisy states typically fail quickly, whereas rollouts that start from frames with accurate contact configurations succeed for much longer. To propagate these physically plausible states across the sequence, we train two HOI tracking policies simultaneously: a forward policy that performs forward rollouts and a backward policy that performs backward rollouts. States from the successful portions of previous rollouts are used to update the corresponding noisy kinematic frames, and subsequent rollouts initialize from these improved states. Overall, this dual propagation and kinematics update mechanism enables the policy to learn from extremely noisy reconstruction results and gradually recover the entire HOI sequence in a physically plausible manner.